矿井提升机作为一个典型的位势力矩负载,要求其拖动电动机机械特性在四个象限内频繁周期性地进行启动、制动和反向运行。在运行过程中的加速度、减速度以及各运行阶段的行程和最后的停车位置都有精确的要求和严格的限制。矿井直流提升机控制系统设计包括主电路电气设计和控制系统参数设计。主电路设计包括变压器、整流器件、平波电抗器、直流电机等主要电气设备选型。该部分保证矿井提升机能够满足生产需要,保证安全运行。提升机采用电枢换向的直流电动机可逆调速方案,该方案采用逻辑无环流的双闭环直流电机控制,可实现直流提升机的四象限运行且能通过逻辑无环流控制确保主电路不会出现环流。
1、晶闸管-电动机系统电气元件选型实验
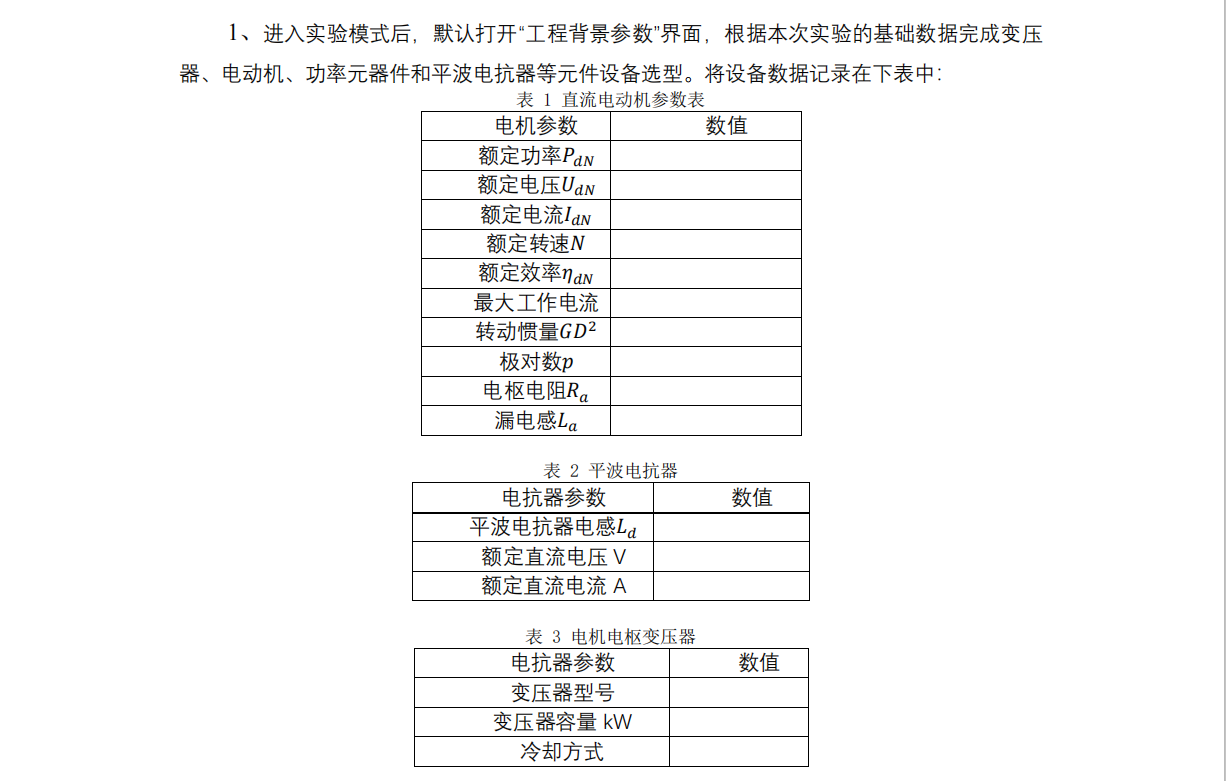
根据提升系统速度图、力图计算得到负载曲线,按此计算得到额定直流电流,额定直流电压,选择直流电动机并确定各种电流整定值。
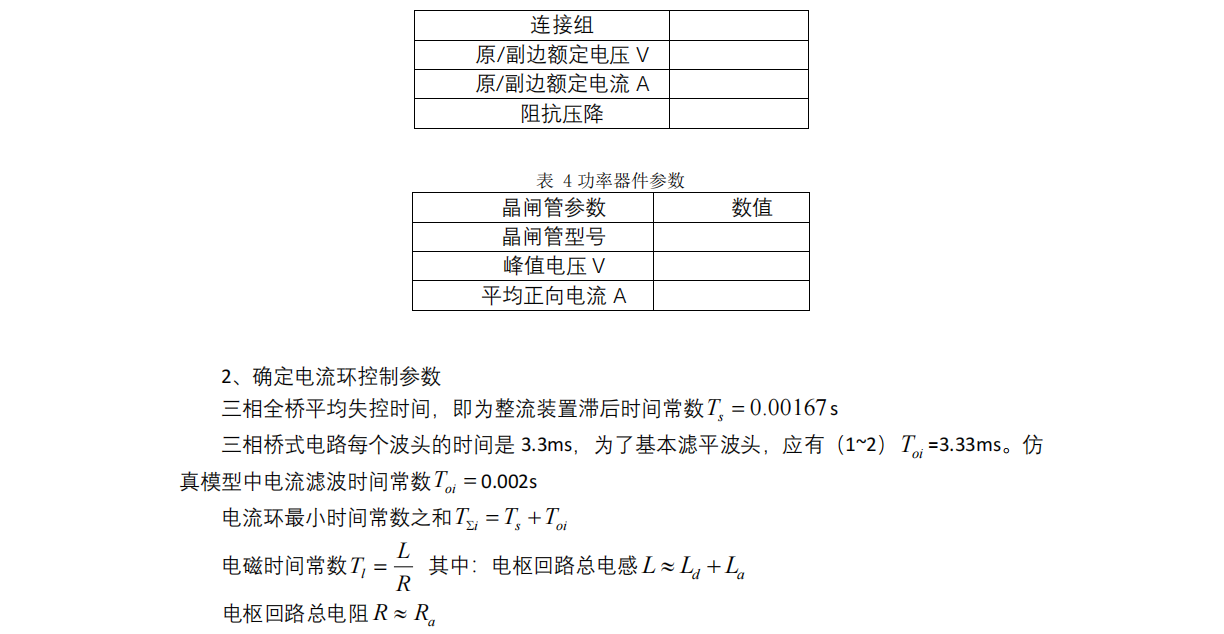
在矿井提升机电力传动系统中,变流变压器是一个重要组成部分。其绕组的连接方式以及主要电气参数均需与变流装置设计计算时并考虑。整流器件选择时应考虑所承受的最大峰值电压。
为使晶闸管不至因过热而损坏,根据晶闸管实际通过电流的有效值,并考虑留有1.5-2倍的安全裕量作为晶闸管电流定额。
为减小电流断续区,常在电枢回路串联平波电抗器。 为了保证电流连续,电枢回路中应具备的电感量LL ,为了保护直流电动机换向器换向的安全,通常要限制电枢电流脉动分量,电枢回路中应具备的电感量 LM,电枢回路应具有的电路量为 LL 和 LM 中的较大值。而滤波电抗器的电感量 Ld 应为所需的总电感减去电枢绕组电感量 La 和整流变压器所有的漏感。
2.矿井直流无环流控制可逆提升控制系统设计实验
对于大容量的矿井提升直流拖动系统,常采用既没有直流平均环流又没有瞬时脉动环流的无环流控制可逆系统。

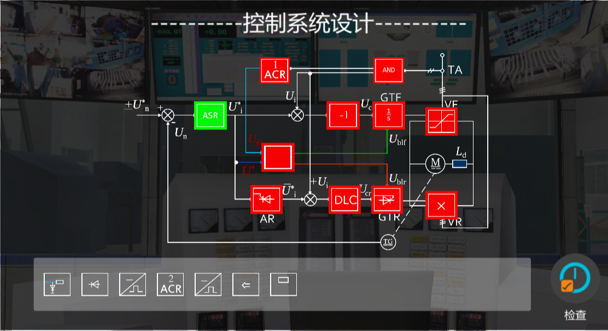
图1矿井直流可逆提升控制系统原理
图1为矿井直流可逆提升控制系统框图,为了保证不出现环流,设置了无环逻辑控制环节DLC,这是系统中的关键环节。它按照系统的工作状态,指挥系统进行正、反组的自动切换,其输出信号 Ublf 用来控制正组触发脉冲的封锁或开放,Ublr 用来控制反组触发脉冲的封锁或开放。
3.控制参数设计及提升系统性能测试实验
矿井提升系统虚拟仿真实验中控制参数设计具体要求如下:①稳态指标:转速、电流无静差;②动态指标:电流超调量<=5% ,启动到额定转速时的转速超调量<=10%。根据上述要求,具体转速、电流双闭环控制参数设计过程如下:
1)电流环控制参数设计
图2是矿井提升系统简化后电流内环结构框图,根据设计要求的超调量,为保证稳态电流无差,可按照I型系统设计电流环。由于电流环控制对象是双惯性环节,所以采用PI型电流调节器。
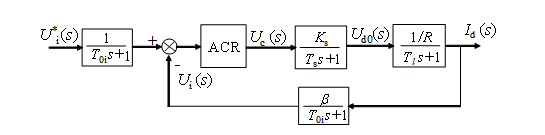
图 2电流环结构框图
2)转速环控制参数设计
图3是矿井提升系统简化后转速外环结构框图,为了实现转速无静差转速调节器应设计为典型II型系统,可以同时满足动态和抗扰性能。ASR也应设计为PI调节器。
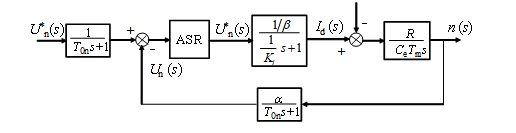
图 3转速环结构框图